Bem-vindos ao
Laboratório
de Sistemas Inerciais e Fusão Sensorial
O Laboratório
de Sistemas Inerciais e Fusão Sensorial resulta de parceria
entre as Divisões de Engenharia Eletrônica e
Engenharia Aeronáutica do ITA, pesquisando e desenvolvendo algoritmos e
subsistemas voltados à navegação inercial auxiliada por fusão
sensorial,
guiamento, controle e estimação de sistemas dinâmicos. Historicamente,
é uma continuação e aprofundamento do escopo e objetivos do Laboratório de
Visão Computacional Ativa e Percepção, que, na década de 90,
desenvolveu no ITA projeto com recursos da FAPESP e CAPES na área de
Visão Computacional
Ativa utilizando uma cabeça de visão estereoscópica.
Atualmente, o laboratório tem empregado recursos
do Projeto
FINEP-DCTA-INPE/Sistemas Inerciais para Aplicação Aeroespacial (Projeto
SIA), Projeto CNPq-FAPESP/INCT Ciências do Espaço, e Projeto
FINEP-UnB-ITA-XMobots/Desenvolvimento de Mini-VANT com Imageador
Giroestabilizado. Os resultados do laboratório nas áreas de estimação e
controle de sistemas dinâmicos, navegação, guiamento e visão
computacional têm aplicações em satélites universitários e veículos
aéreos não tripulados (VANT).
O laboratório tem integrado e
ensaiado no solo e em voo imageadores giroestabilizados capazes de
navegação inercial auxiliada por fusão com GPS, altímetro e
magnetômetro, também apresentando a capacidade de apontamento com
georeferenciamento. O laboratório tem desenvolvido software embarcado
para controle desses imageadores em tempo real. Também vem sendo
desenvolvido e ensaiado auxílio à navegação
inercial baseado em visão computacional rodando em tempo real prevendo
situações em que os sinais de GPS não estão disponíveis ou não são
confiáveis.
[Escopo e objetivos][Cabeça
de visão ativa] [História]
[Disciplinas] [Equipamentos]
[Publicações] [Integrantes]
[Fotos/Vídeos]
Escopo
e objetivos:
Navegação inercial busca estimar a
posição, velocidade e,
também, a
atitude de um veículo a partir de medidas de força específica e
velocidade angular em relação ao referencial inercial provenientes,
respectivamente, de acelerômetros e girômetros de uma unidade inercial
embarcada. Oferece a vantagem de autonomia em relação a auxílios
externos. Entretanto, requer
sensores caros e sofisticados para manter os erros limitados à classe
inercial, a saber, uma milha náutica por hora de operação. O emprego de
sensores inerciais de baixo custo degrada significativamente esse nível
de
acurácia e requer, portanto, o auxílio de sensores adicionais. Como
consequência, o sistema de navegação auxiliado por fusão sensorial
deixa de ser autônomo e pode
sofrer influência de perturbações externas, sejam elas intencionais ou
não. O auxílio à navegação advém de processamento estatístico dos
sinais de
receptores de GPS, magnetômetros, baro-altímetros e câmeras de vídeo
analógico e digital.
Mais recentemente, o Laboratório de Sistemas Inerciais e Fusão Sensorial tem
projetado, desenvolvido, integrado e testado diversos imageadores e o
software embarcado de
tempo real que os controla e provê as funcionalidades de fusão
sensorial para navegação
inercial auxiliada, de giroestabilização
e de apontamento georeferenciado. Muitas partes mecânicas são
fabricadas com impressão
3D no laboratório.
Em
especial, o auxílio à navegação
inercial
empregando visão computacional objetiva prover robustez à ausência
de sinais GPS. Visão é um dos mais
poderosos sentidos que
possuímos. A modelagem e as teorias computacionais para descrever o
processo visual, a concepção e a implementação
de sistemas que buscam emular o aparato visual
humano derivam de pesquisas multidisciplinares envolvendo física
óptica,
estimação e controle de sistemas dinâmicos, assim como neurofisiologia,
psicologia, psicofísica e áreas afins. Visão propicia informação
sobre
as posições e propriedades dos objetos observados, as relações
entre si mesmos, o ambiente que
os cerca e o movimento do observador.
A informação extraída de imagens, o
conceito
de observabilidade em sistemas dinâmicos e a implementação em tempo
real de algoritmos para a fusão
estatística de medidas dos sensores embarcados permitem
atacar os problemas de navegação de plataformas de pequeno porte na
ausência de sinais de GPS e de
estimação da estrutura
tridimensional observada. Também importante é superar o desafio de
cumprir
com os requisitos de acurácia da navegação mediante fusão sensorial em
tempo real, conforme acima discutido, com equipamentos, recursos
computacionais e sensores comercialmente
disponíveis e dentro dos limites de orçamento do laboratório.
O laboratório instrumentou
aeromodelos comerciais, motoplanadores projetados e
desenvolvidos no próprio laboratório e uma
bicicleta para uso como plataformas
para prova de conceito dos algoritmos e subsistemas em
condições realistas de operação. Os ensaios em voo ocorrem quando há
NOTAM (Notice to Airmen) emitido pelo SRPV-SP para tal.
Cabeça
estereoscópica com vergência assimétrica para experimentos com visão
ativa (1995-1999)

A cabeça de
visão empregada no passado constituía-se
de motores DC atuando sobre os eixos de pan, tilt
e vergência
assimétrica. Duas unidades controladoras, englobando circuitos lógicos
e
de potência para acionamento PWM e controle PID, serviam de interface
para envio de comandos para a cabeça. O imageamento era feito
através de câmeras CCD e lentes servocontroladas, sendo a abertura do
diafragma das lentes, foco e distância focal (zoom) ajustados segundo
as necessidades
da tarefa visual a ser realizada. (TRAEDV-N.MPG
- 2.6MB).
O
laboratório, na época, contou com os seguintes equipamentos:
- 2 câmeras monocromáticas Hitachi KP-M1U e 1 câmera
colorida Hitachi VK-370;
- 2 Microcomputadores Pentium 166 MHz, 4 Gb HD SCSI, 32 Mb RAM,
CD-ROM
8x, monitores 17';
- Cabeça de Visão TRC-Helpmate Bi-Sight;
- VCR e TV;
- Placa de aquisição de vídeo FAST com chip de descompressão
MPEG;
- Lentes servocontroláveis Fujinon H10x11E-MPX31e placas de
aquisição
de imagens DT3552.
História:
Laboratório de Visão Computacional Ativa e Percepção (1995-1999):
"...soluções robustas para o
problema
de visão não se materializaram, principalmente porque Marr
deixou de fora de sua teoria um fato muito importante: o de que todos
os
sistemas visuais existentes na natureza, dos insetos aos peixes,
cobras,
pássaros e humanos, são ativos. Sendo ativos, eles controlam
o processo de aquisição de imagens no espaço e no
tempo, introduzindo desta forma restrições que facilitam
muito a recuperação de informação sobre o mundo
tridimensional (reconstrução). "Eu movo, portanto eu
vejo" é uma afirmação fundamentalmente verdadeira. Tornando-se
estacionário o olho humano, começa-se a perder a percepção."
Y. Aloimonos (1993)
Visão computacional é uma ciência
baseada em fundamentos
teóricos, a qual requer experimentos para que seja validada uma
teoria e/ou algoritmo. Assim, aliados à intenção
de se estudar percepção visual orientada por tarefa (visão
com propósito) e realimentação visual,
algoritmos de visão foram testados em um sistema de visão binocular
capaz de, em tempo real,
alterar
seus parâmetros de aquisição de imagens. O imageamento tornava-se um
processo dinâmico a ser controlado de acordo com as informações
visuais já obtidas e ainda por extrair. As informações
visuais provenientes dos algoritmos de visão computacional eram
empregadas no controle da pose da cabeça, a vergência entre as câmeras,
a distância focal das lentes (zoom), o foco e a abertura do diafragma
das lentes através
de
sinais de ativação enviados por uma rede de computadores
que conseguiam executar em tempo hábil os algoritmos de visão e
controle. Cabe notar que a
capacidade computacional dos computadores pessoais de mesa então
usados, Pentium 166 MMX, era bastante limitada.
O laboratório, na época, investigou
técnicas de identificação, controle e
estimação, calibração
de sistemas de visão e algoritmos de visão computacional
para a implementação de comportamentos visuais para:
-Automação de processos envolvendo visão como
sensor;
-Navegação inercial auxiliada por visão;
-Rastreamento de objetos;
-Reconstrução 3-D a partir de estereoscopia, movimento e textura.
início
Disciplinas
relacionadas:
EE-292:
Visão Computacional para Controle de Sistemas (1995-2000)
ELE-82: Aviônica
(2000-2014)
ELE-26: Sistemas Aviônicos
EES-60: Sensores e Sistemas
para Navegação e Guiamento
EE-294: Sistemas
de Pilotagem e Guiamento
EE-295: Sistemas
de Navegação Inercial e Auxiliados por Fusão Sensorial
inicio
Equipamentos:
- Aeromodelo Hangar 9 modelo Alpha 60 com diversas
motorizações a combustão interna;
- Motoplanadores com propulsão elétrica;
- Autopilotos comerciais para controle, guiamento e
navegação dos VANTs de pequeno porte acima mencionados;
- Ferramentas e máquinas para fabricação mecânica e reparos
simples;
- Impressora 3D;
- Versões distintas de imageadores com três gimbals;
- Recursos computacionais, também para emprego embarcado, e
software para
desenvolvimento de sistemas de navegação, visão computacional e fusão
sensorial em tempo real;
- Câmeras analógicas e digitais e lentes servocontroladas;
- Enlaces para telemetria, telecomando e vídeo;
- Diversas unidades de medidas inerciais (IMUs) de baixo custo com receptor de GPS, altímetro e
magnetômetro integrados;
- Receptores GPS;
- Magnetômetros.
inicio
Publicações
Viegas, W. da V.C. ;
Waldmann, J.; Santos, D.A.; Waschburger, R. Controle em três eixos para
aquisição de atitude por satélite universitário partindo de condições
iniciais desfavoráveis. Controle & Automação (Impresso), v. 23, p.
231-246, 2012.
Ferreira, J.C.B.C.;
Waldmann, J. Covariance Intersection-Based Sensor Fusion for Sounding
Rocket Tracking and Impact Area Prediction. Control Engineering
Practice, v.15, p. 389-409, 2007.
Waldmann, J.
Feedforward INS aiding: an investigation of maneuvers
for in-flight alignment. Controle & Automação (Impresso), v. 18, p.
459-470, 2007.
Waldmann, J.
Line-of-Sight Rate Estimation and Linearizing Control of an Imaging
Seeker in a Tactical Missile Guided by Proportional Navigation. IEEE
Transactions on Control Systems Technology, v.10, n.4, p. 556-567,
2002.
Caetano, F. F.;
Waldmann, J. Attentional
Management for Multiple Target Tracking by a Binocular Vision Head.
SBA. Sociedade Brasileira de Automática, Campinas, v.11, n.3, p.
187-204, 2000.
Viana, S. A. A.;
Waldmann, J.; Caetano,
F.F. Non-Linear Optimization-Based Batch Calibration with Accuracy
Evaluation. SBA. Sociedade Brasileira de Automática, Campinas, v. 10,
n.2, p. 88-99, 1999.
Waldmann, J.;
Bispo, E. M. . Saccadic Motion Control for Monocular Fixation in a
Robotic vision Head: A Comparative Study. Journal of the Brazilian
Computer Society, Campinas, v. 4, n.3, p. 61-69, 1998.
Chagas, R.A.J.; Waldmann, J. A Novel
Linear, Unbiased Estimator to Fuse Delayed Measurements in Distributed
Sensor Networks with Application to UAV Fleet. Springer, 2013 (Edited
Volume -Bar-Itzhack Memorial Symposium on Estimation, Navigation, and
Spacecraft Control - Daniel Choukroun (Ed.)).
Chagas,
R.A.J.; Waldmann, J. A Novel Linear, Unbiased Estimator to Fuse Delayed
Measurements in Distributed Sensor Networks with Application to UAV
Fleet. Itzhack Y. Bar-Itzhack Memorial Symposium on Estimation,
Navigation, and Spacecraft Control, 2012, Haifa, Israel.
Chagas,
R.A.J.; Waldmann, J. Observability Analysis for the INS Error Model
with GPS/Uncalibrated Magnetometer Aiding. Itzhack Y. Bar-Itzhack
Memorial Symposium on Estimation, Navigation, and Spacecraft Control,
2012, Haifa, Israel.
Chagas, R.A.J.; Waldmann, J. Geometric Inference-Based Observability
Analysis Digest of INS Error Model with GPS/Magnetometer/Camera Aiding.
19th Saint Petersburg International Conference on Integrated Navigation
Systems, 2012, São Petersburgo, Rússia.
Lustosa, L.R.; Waldmann, J. A novel
imaging measurement model for vision and inertial navigation fusion
with extended Kalman filtering. Itzhack Y. Bar-Itzhack Memorial
Symposium on Estimation, Navigation, and Spacecraft Control, 2012,
Haifa, Israel.
Cordeiro,
T.F.K.; Waldmann, J.. Covariance analysis of accelerometer-aided
attitude estimation for maneuvering rigid bodies. VII Congresso
Nacional de Engenharia Mecânica CONEM 2012, Sao Luis - MA.
Godoi,R.G.;
Waldmann, J. Sistema de Controle de Atitude Para Satélite Estabilizado
em 3 Eixos com Rodas de Reação. VII Simpósio Brasileiro de Engenharia
Inercial, 2012, São José dos Campos, SP.
dos Santos, S. R.
G. ; Waldmann, J. Desenvolvimento de um Ambiente de Teste para
Implementação em Tempo Real de Sistema de Controle de Atitude. VII
Simpósio Brasileiro de Engenharia Inercial, 2012.
início
Integrantes
e colaboradores (setembro 2014):
- Jacques Waldmann:
Professor - Coordenador - ITA
- Raul Ikeda
Gomes da Silva:
Professor - INSPER
- Rafael Marcus Contel Coutinho
Técnico
- Leonardo Teles da Silva
Técnico
- Marcus Vinicius da Costa Ramalho
Engenheiro Aeronáutico - Colaborador - Itamaraty
- Maurício
Andrés Varelas Morales
Professor - Colaborador - ITA
- Sérgio Frascino Müller de Almeida
Professor - Colaborador - ITA
- Thiago Felippe Kurudez Cordeiro
Professor - Colaborador - UnB
- Ronan Arraes Jardim Chagas
D.C. Engenharia Eletrônica - Pesq. - Colaborador - INPE
- Tiago Bücker
M.C. Engenharia Eletrônica - Colaborador
início
Fotos/Vídeos:
 Primeira
configuração utilizada para pesquisa em rastreamento mediante
visão monocular, empregando microcâmera pinhole
Pacific VP-500 dotada de lente com distância focal 3.7mm. (Dez/96).
Primeira
configuração utilizada para pesquisa em rastreamento mediante
visão monocular, empregando microcâmera pinhole
Pacific VP-500 dotada de lente com distância focal 3.7mm. (Dez/96).
Algoritmo 1: Deteção de movimento, segmentação
por nível de cinza e estimação do centróide
de movimento. Requer fundo com textura quase homogênea. (AUTOTR-N.MPG
- 525 KB)
Algoritmo 2: Compensação do movimento do fundo induzido
pela movimentação da câmera mediante utilização
de informação dos encoders acoplados à cabeça
de visão, filtragem via operadores morfológicos, segmentação
por movimento e estimação do centróide de movimento.
Requer conhecimento da distância focal da lente. (EDVATR-N.MPG
- 1.7MB)
Configuração
empregada para avaliação do controle de vergência e
movimentos de pan e tilt do sistema esteroscópico,
chaveamento entre fontes de sinal de vídeo e desenvolvimento da
interface gráfica. ( Jul/96 - Mar/97)
Vídeo de apresentação do LVCAP-ITA/INPE enviado
ao CNPq, apresentando a interface gráfica e os modos de controle
de posição e velocidade angular. (CNPQ-S.MPG
- 39.7MB)
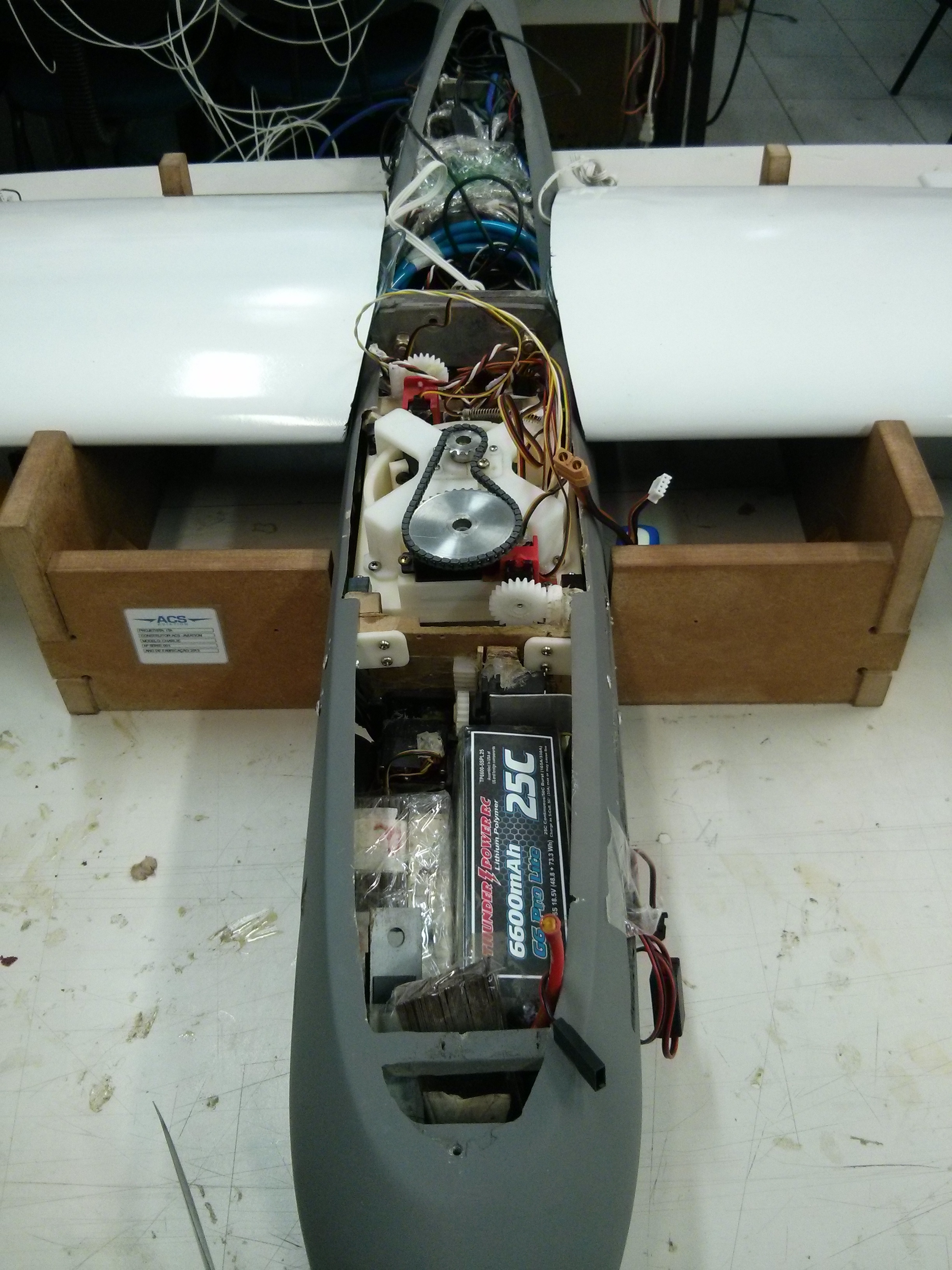
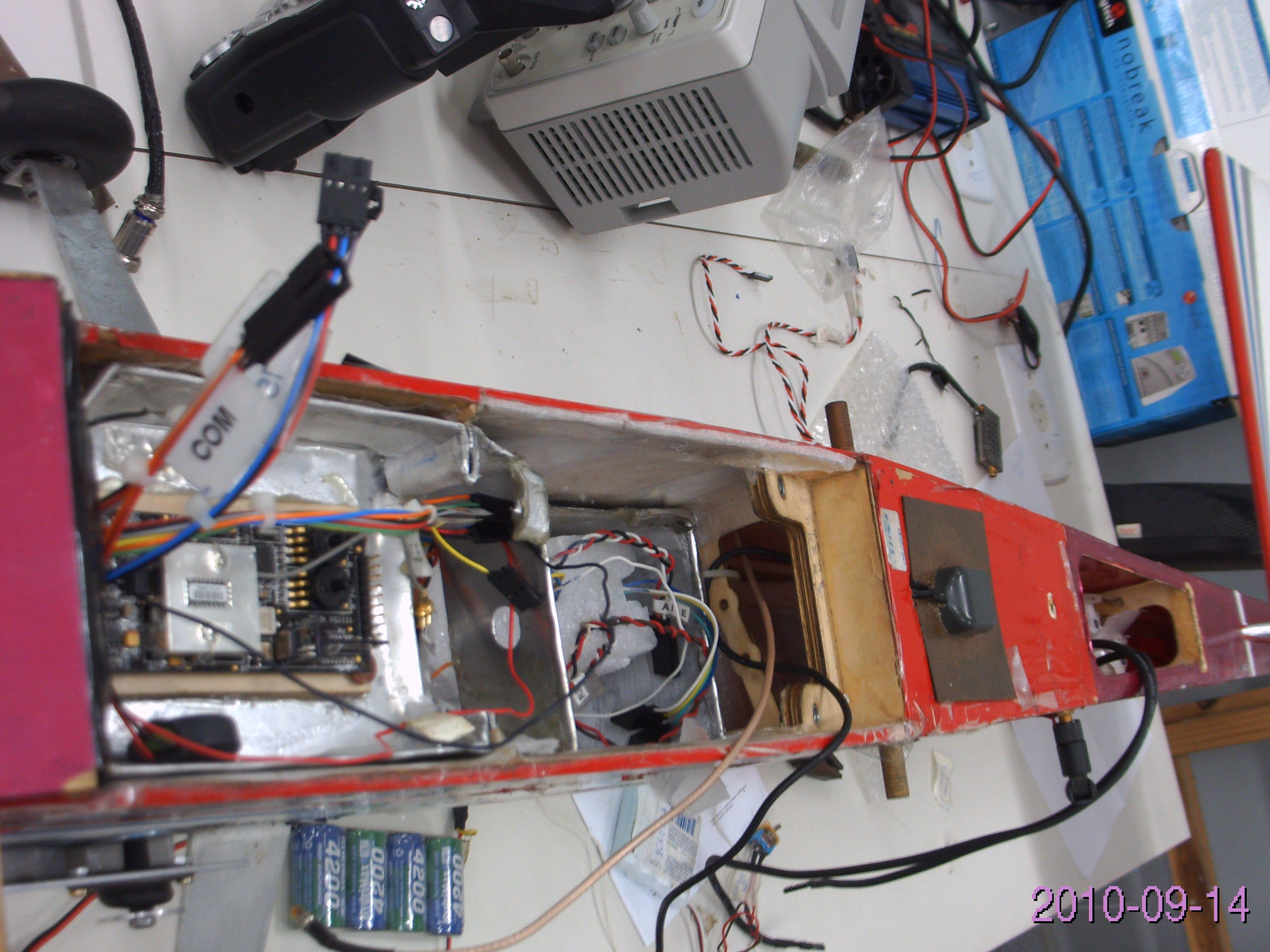
Plataformas
para testes: VANTs e bicicleta instrumentados para integração
INS/GPS/magnetômetro/câmera



Resultados de
navegação inercial auxiliada por
integração INS/GPS/magnetômetro - experimentos contaram com os
sensores sendo transportados a pé ou de bicicleta/capacete:
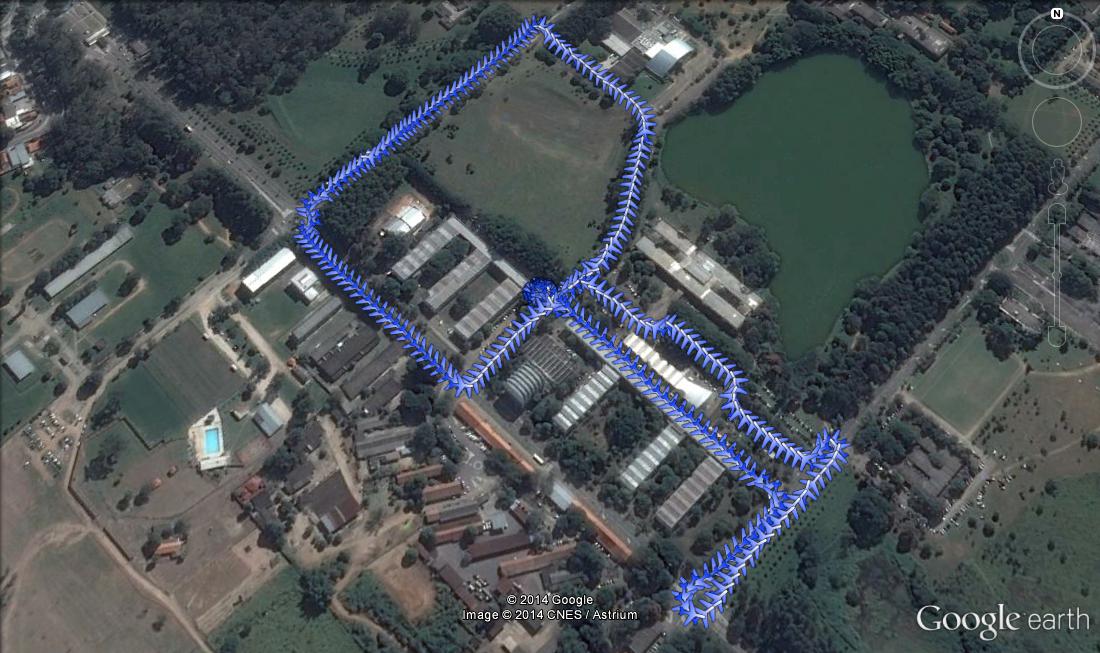
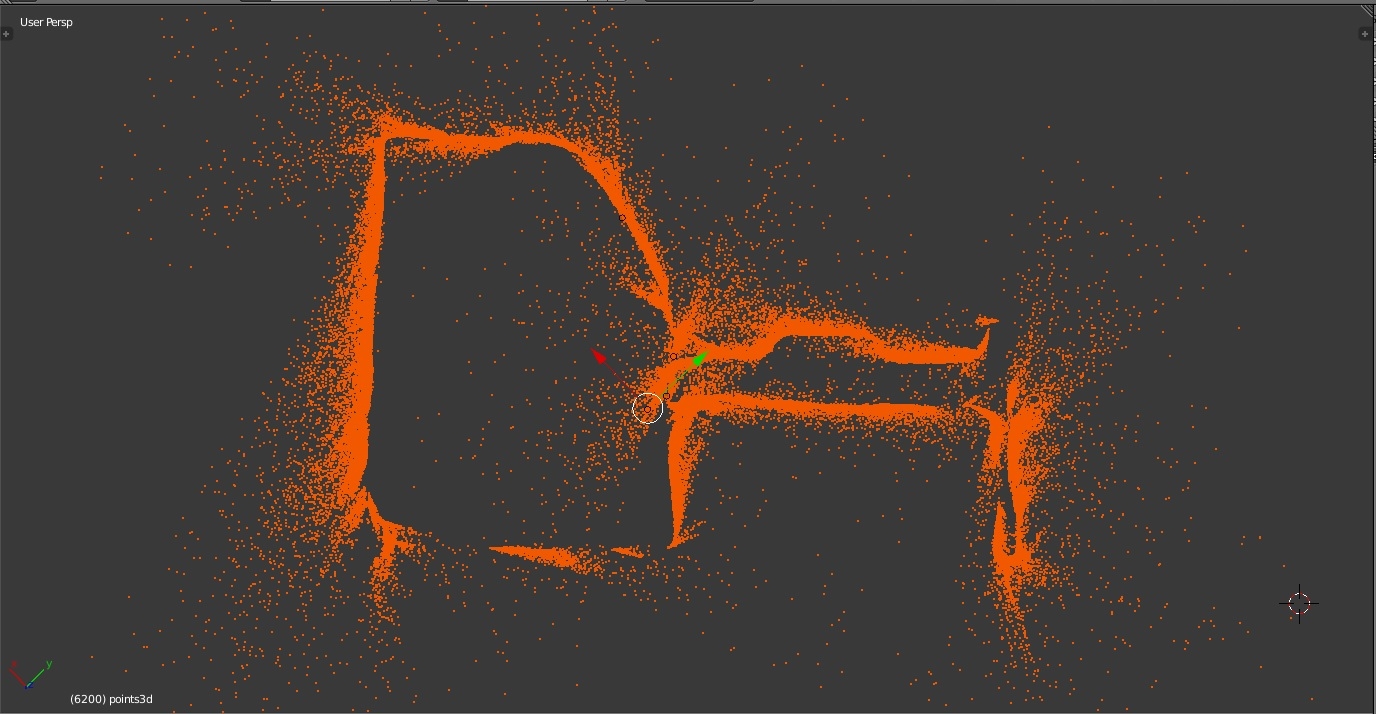
Vista superior da reconstrução 3D do cenário
visualizado pela câmera no capacete durante a
navegação inercial auxiliada por
integração INS/GPS/magnetômetro. Fluxo óptico assumido como sendo
originado somente do egomovimento da câmera (o cenário é fixo).
Imagens com carros ou ciclistas se movendo em relação ao cenário fixo não foram consideradas na fusão sensorial.
Vídeo da reconstrução 3D do cenário
visualizado pela câmera no capacete durante a
navegação inercial auxiliada por
integração INS/GPS/magnetômetro em experimento durando 5 minutos.
Visualização com Octree usando voxels cúbicos de aresta 1m, partindo do ponto marcado na imagem acima com um círculo branco.
Diferenças de altitude marcadas com colorações distintas.
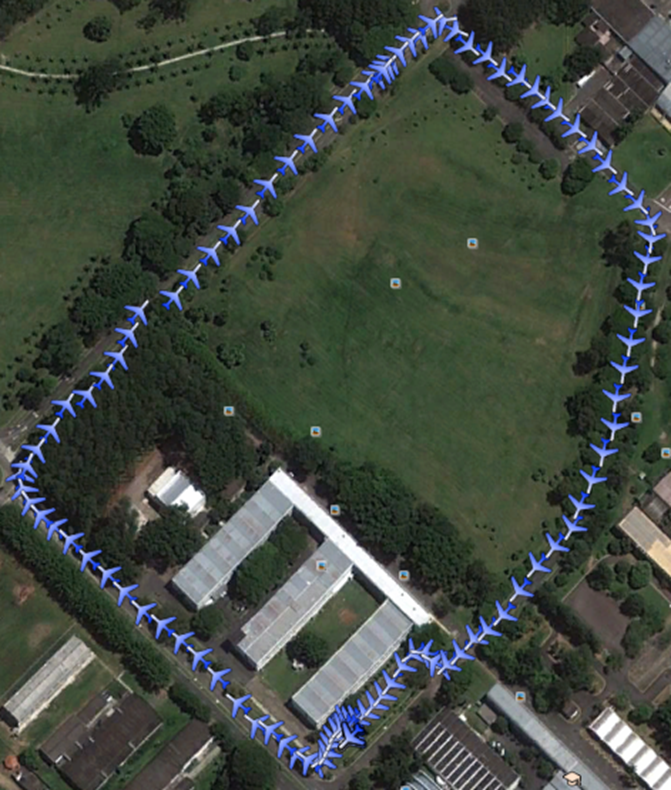
Ciclista segue inicialmente em direção ao
refeitório, completa a volta em torno da região entre o ITA e o
refeitório, gira à direita para passar pela Reitoria, desce a
inclinação e vira à direita, segue até a rotatória, gira 180 graus,
segue em frente, vira à esquerda e sobe a rampa para passar pelo
estacionamento entre os prédios da ELE/COMP e biblioteca e retorna ao
ponto inicial.
As cores diferentes na região do ponto inicial, entre o início e
o fim do experimento, se deve à mudança na geometria dos satélites GPS
durante seu voo orbital ao longo do experimento, que causou uma
diferença de altitude estimada do receptor GPS de quase 10m e se
refletiu na reconstrução 3D.
ExperimentoINS-GPS-FluxoOptico_reconstr3DAbril2015.mp4
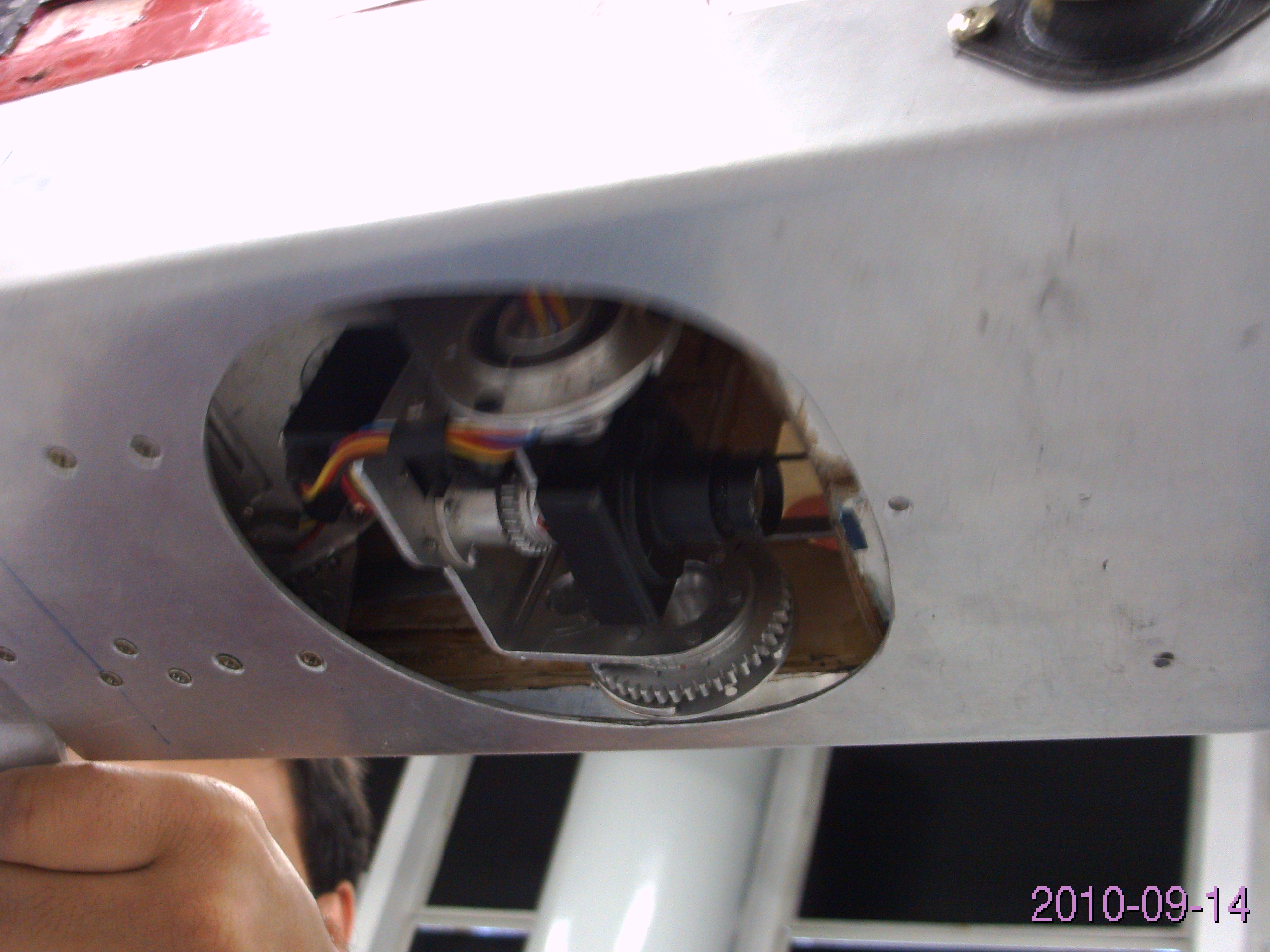
Vídeo do
casulo imageador com três gimbals
Mk03 projetado, impresso em 3D, integrado ao motoplanador e testado no
laboratório -
equipado com câmera analógica Sony Block IXA operando em modo
giroestabilizado:
imageador 02.wmv


Projeto 3D do motoplanador com casulo
imageador
Rastreio de alvo com método MITSA por casulo imageador servoatuado em pan/tilt por motores de passo:
Rastreio20150602.avi
Outro exemplo de rastreio com mesmo casulo imageador - vista externa:
fc2_save_2015-06-16-170727-0000.mp4
Estabilização
de imagens com base no
fluxo óptico. Vídeo
coletado no campus do ITA com câmera digital PointGrey Firefly
monocromática
instalada no capacete. Bicicleta instrumentada para captura do vídeo e
transmissão para estação remota.
Motivação biológica
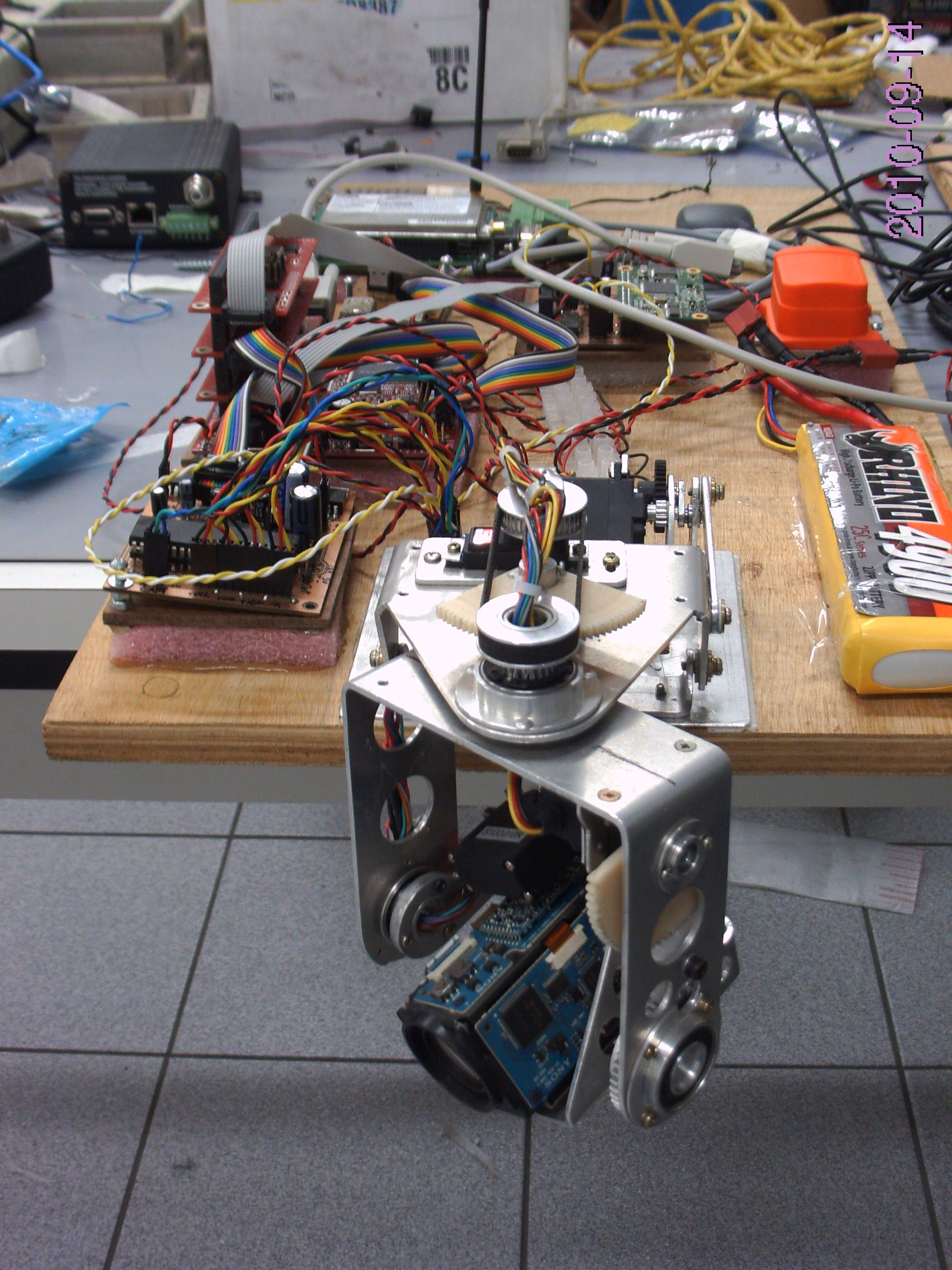
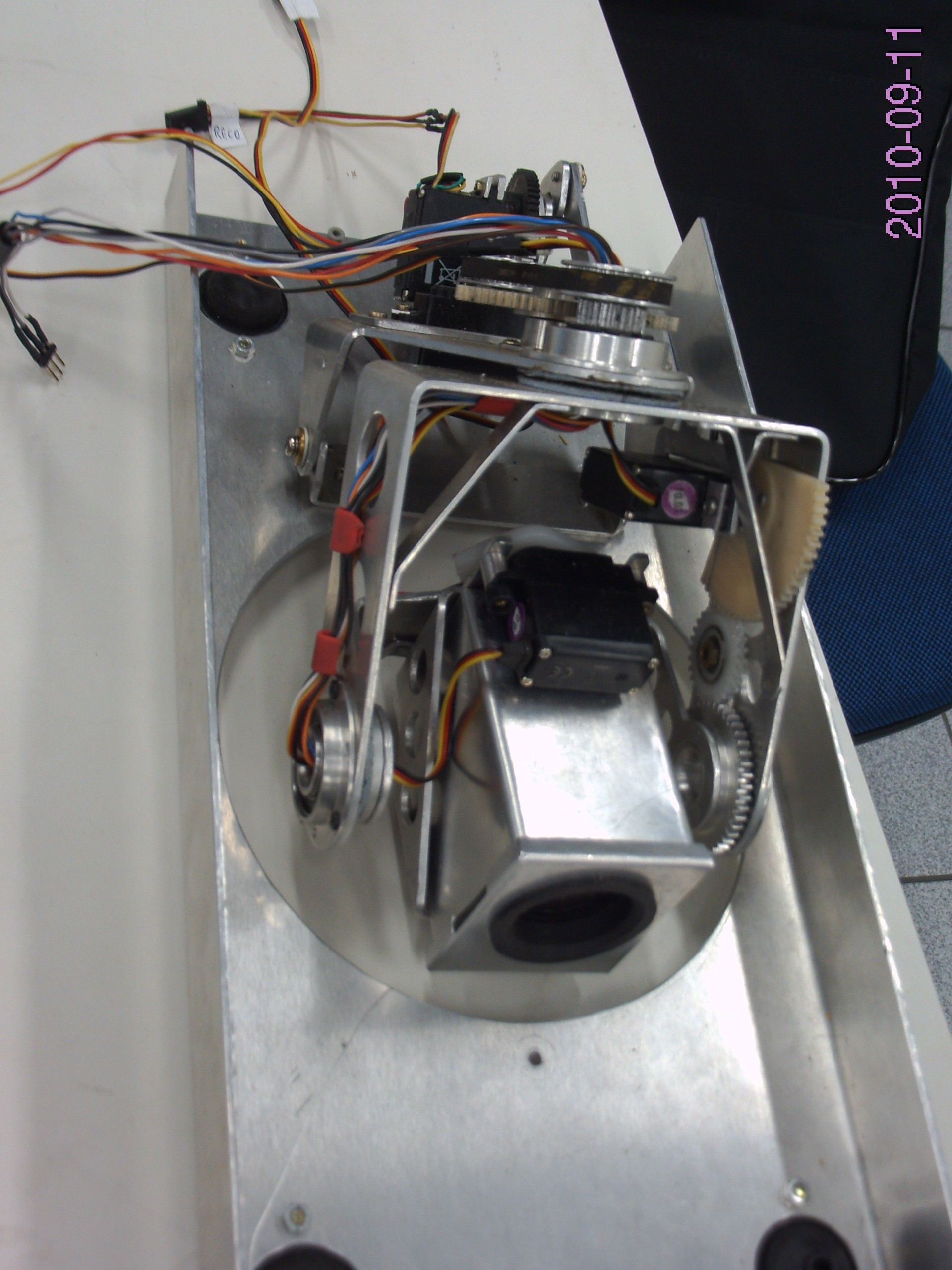
Vídeo
de um protótipo de imageador giroestabilizado em três eixos - outubro
de 2010
Primeiros
protótipos de casulo imageador projetados - fabricados em poliacetal
usinado com máquina CNC:
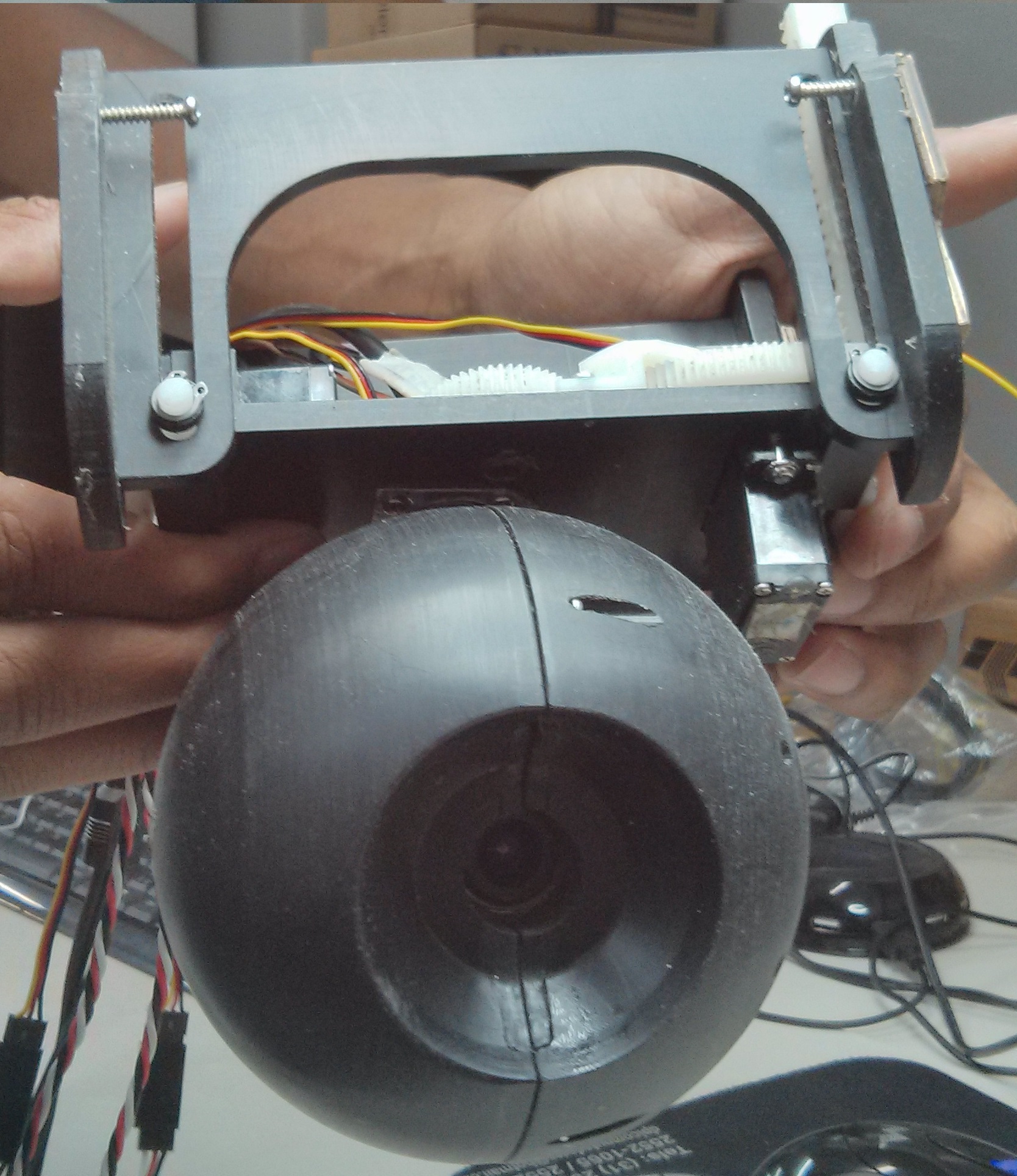

Protótipo mais
antigo, com amortecedor mecânico para mitigar vibrações:


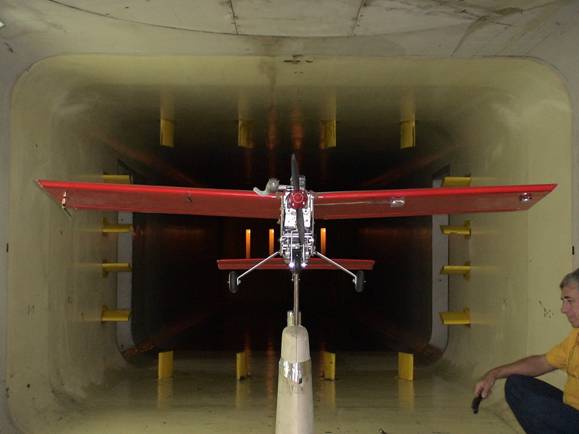
Ensaios no túnel de vento do Instituto de Aeronáutica e Espaço (IAE)



Página em construção - por vir: vídeos e imagens de ensaios em voo
início
[Escopo e objetivos] [Cabeça
de visão ativa]
[História] [Disciplinas]
[Equipamentos] [Publicações] [Integrantes][Fotos/Vídeos]
|
Última atualização:
|
Página construída por:
|
|
19/junho/2015
|
JW
|