Welcome to the
Inertial Systems and Sensor Fusion Lab
The Inertial Systems and Sensor Fusion Lab results
from a collaboration of the Divisions of Aeronautical and Electronics
Engineering at ITA, and conducts research and development of algorithms
and subsystems for inertial navigation aided by sensor fusion,
guidance, estimation and control of dynamic systems. Historically, the
lab is a continuation and deepening of the scope and objectives of the
early Laboratory of Computer Vision and Active Perception, which in the
1990s developed at ITA a project with support of state and federal
funding agencies, respectively FAPESP and CAPES, in the area of Active
Computer Vision using an antropomorphic head equipped with stereoscopic vision
. The lab has been funded by Project
FINEP-DCTA-INPE/Inertial Systems for Aerospace Apllication (Project
SIA), Project CNPq-FAPESP/INCT Space Sciences, and Project
FINEP-UnB-ITA-XMobots/Development of a Mini-UAV with a
Gyrostabilized Imaging Pod. The results in the areas of estimation and
control of dynamic systems, navigation, guidance, and computer vision
have been applied to university satellites and UAVs.
The lab has integrated and tested
on the ground and in flight gyrostabilized imaging pods and sensor
fusion algorithms for inertial navigation aided by GPS, altimeter, and
magnetometer, and georeferenced pointing. The lab has developed the
embedded softwarerunning on board the imaging pod for real-time
navigation, attitude estimation, and control of gyrostabilization and
georeferenced pointing. More recently, the lab has directed efforts
towards developing and testing computer vision-aided inertial
navigation in real time to provide a robust solution in scenarios where
jamming results in GPS outage.
[Scope and objectives][Active vision head] [History]
[Course work] [Equipment]
[Publications] [Staff and collaborators]
[Photos/Videos]
Scope and objectives:
Inertial navigation aims at
the estimation of position, velocity, and often attitude of a vehicle
from inertial measurements acquired on board, that is, specific force
and angular rate with respect to an inertial reference frame provided,
respectively, by accelerometers and rate-gyros assembled within an
inertial measurement unit (IMU). Inertial navigation has the advantage
of autonomy with respect to external aiding. However, sophisticated,
expensive sensors are called for to arrest the navigation errors within
the acceptable limits for inertial navigation, often considered
to be in the order of one nautical mile per hour of operation. The use
of low-cost inertial sensors severely degrades accuracy to a much
poorer level and thus additional sensors are required to reach the
acceptable error limits previously mentioned. Hence, the inertial
navigation system (INS) aided by sensor fusion becomes dependent on
aiding sensors that compromise the previous autonomy since such aiding
sensors are subject to external disturbances, or intentional jamming.
Navigation aiding via sensor fusion arises from the statistical
processing of signals from GPS receivers, magnetometers,
baro-altimeters, and analog or digital video cameras.
More recently, the staff and collaborators in the Inertial Systems and Sensor Fusion Lab have
conceived, designed, developed, integrated, and tested various imaging
pod prototypes and the embedded software for real-time control that
provides the capabilities of aided inertial navigation,
gyrostabilization, and georeferenced pointing. Most of the mechanical
parts in the latter versions of the imaging pod are now prototyped in
the lab with 3D printing.
A more detailed consideration
of the potential advantages of sensor fusion for inertial navigation
aiding favors the use of computer vision to provide robustness to GPS
outage. Vision is among the most powerful senses available.
Multidisciplinary research involving physics, optics, estimation and
control of dynamic systems, as well as neurophysiology, psychology, and
psychophysics provide the knowledge required for modeling and
constructing computational theories to describe the visual process, and
for conceiving and implementing systems that attempt to emulate the
human visual apparatus. Vision provides information about the pose
(position and attitude) and properties of observed objects and their
mutual relationships, their surroundings, and the observer's motion.
Visual information extracted via
computer vision algorithms, the mathematical property of observability
in dynamic systems, and the real-time implementation of embedded
algorithms for the statistical fusion of measurement data from a
variety of sensors on board allow one to tackle the problem of
navigation with small-sized vehicles during GPS outage and the
estimation of the observed three-dimensional (3D) structure. One most
motivating challenge in the lab is to successfully meet the technical
requirements of real-time sensor fusion for accurate navigation in
spite of limited resources. The lab is equipped with sensors and autopilots, a commercial
airmodel frame, and electrically powered sailplanes conceived, designed
and prototyped in the lab. A bicycle was also equipped for a proof of
concept of algorithms and subsystems under realistic operation
conditions. Flight tests occur when a NOTAM is issued by SRPV-SP (the
Aeronautical Authority in charge of controlling the access to Brazilian
airspace in the State of São Paulo).
Antropomorphic head with stereoscopic cameras and asymmetric vergence for experiments with active vision (1995-1999)

The
antropomorphic head counted on DC motors to rotate the pan, tilt,
asymmetric vergence axes. Two controller units encompassing logic and
power circuits for PID control and PWM driving, respectively, were the
interface for sending command signals to the head. Imaging was carried
out with CCD cameras with servocontrolled lenses wherein aperture,
focus, and zoom were adjusted according to the requirements of the
visual task. (TRAEDV-N.MPG
- 2.6MB).
The lab, at the time, had the following equipment::
- 2 monochrome cameras Hitachi KP-M1U and 1 color camera Hitachi VK-370;
- 2 PCs Pentium 166 MHz, 4 Gb HD SCSI, 32 Mb RAM,
CD-ROM
8x, tube monitors 17';
- Head TRC-Helpmate Bi-Sight;
- VCR and tube TV;
- Video acquisition board FAST with a special purpose MPEG decompression chip;
- Servocontrolled lenses Fujinon H10x11E-MPX31 and image acquisition boards DT3552.
History: the Computer Vision and Active Perception lab (1995-1999):
"...robust solutions to the vision problem did not materialize, mainly
because Marr has left out of his theory a very important fact: that all
visual systems in nature, from insects to fish, snakes,
birds, and humans, are active. By being active, they control the process of image acquisition in space and
time, thus introducing restrictions that facilitate the
recovery of information about the three-dimensional world (reconstruction).
"I move, therefore I see" is a fundamentally true statement. By becoming
stationary, the human eye loses perception. "
Y. Aloimonos (1993)
Computer
Vision is a science based on theoretical foundations and requires
experiments to validate a theory and/or algorithm. Thus, coupled with
the intent of studying task-oriented visual perception (purposive
vision) and visual feedback, vision algorithms were tested in a
binocular vision head capable of changing the image acquisition
parameters in real time.
Imaging became a dynamic process to be controlled in accordance with
the visual information already obtained and still to extract from the
next images. The visual information from the computer vision algorithms
were employed to control the pose of the head, the vergence angles of
the cameras, the focal lengths, focus, and lenses' apertures through
activation signals sent by a network of computers running the vision
and control algorithms in real time. It should be noted that the computing power of
the PCs then used, Pentium 166 MMX, was quite limited.
The lab, at the time,
investigated techniques for the identification, estimation, and control
of the vision head, calibration of vision systems, and computer vision
algorithms aiming at the implementation of visual behaviors for:
-Automation of processes wherein vision is a sensor;
-Vision-aided inertial navigation;
-Target tracking;
-3D reconstruction from stereoscopic vision, egomotion, and texture.
back
Course work:
EE-292:
Visão Computacional para Controle de Sistemas (1995-2000)
ELE-82: Aviônica
(2000-2014)
ELE-26: Sistemas Aviônicos
EES-60: Sensores e Sistemas
para Navegação e Guiamento
EE-294: Sistemas
de Pilotagem e Guiamento
EE-295: Sistemas
de Navegação Inercial e Auxiliados por Fusão Sensorial
back
Equipment:
- Airframe Hangar 9 model Alpha 60 with various internal combustion engines;
- Electrically powered sailplanes;
- Commercial autopilots for control, guidance, and navigation of the above mini-UAVs;
- Tools and machine shop for simple repairs and manufacturing;
- 3D printer;
- Distinct 3-gimballed imaging pod prototypes;
- Computing
resources, embedded implementations included, and software for the
development of real-time navigation systems, computer vision, and
sensor fusion;
- Analog and digital cameras and servocontrolled lenses;
- Telemetry, telecommand, and video links;
- Various low-cost IMUs with integrated GPS receiver, altimeter, and magnetometer;
- GPS receivers;
- Magnetometers.
inicio
Publications
Viegas, W. da V.C. ;
Waldmann, J.; Santos, D.A.; Waschburger, R. Controle em três eixos para
aquisição de atitude por satélite universitário partindo de condições
iniciais desfavoráveis. Controle & Automação (Impresso), v. 23, p.
231-246, 2012.
Ferreira, J.C.B.C.;
Waldmann, J. Covariance Intersection-Based Sensor Fusion for Sounding
Rocket Tracking and Impact Area Prediction. Control Engineering
Practice, v.15, p. 389-409, 2007.
Waldmann, J.
Feedforward INS aiding: an investigation of maneuvers
for in-flight alignment. Controle & Automação (Impresso), v. 18, p.
459-470, 2007.
Waldmann, J.
Line-of-Sight Rate Estimation and Linearizing Control of an Imaging
Seeker in a Tactical Missile Guided by Proportional Navigation. IEEE
Transactions on Control Systems Technology, v.10, n.4, p. 556-567,
2002.
Caetano, F. F.;
Waldmann, J. Attentional
Management for Multiple Target Tracking by a Binocular Vision Head.
SBA. Sociedade Brasileira de Automática, Campinas, v.11, n.3, p.
187-204, 2000.
Viana, S. A. A.;
Waldmann, J.; Caetano,
F.F. Non-Linear Optimization-Based Batch Calibration with Accuracy
Evaluation. SBA. Sociedade Brasileira de Automática, Campinas, v. 10,
n.2, p. 88-99, 1999.
Waldmann, J.;
Bispo, E. M. . Saccadic Motion Control for Monocular Fixation in a
Robotic vision Head: A Comparative Study. Journal of the Brazilian
Computer Society, Campinas, v. 4, n.3, p. 61-69, 1998.
Chagas, R.A.J.; Waldmann, J. A Novel
Linear, Unbiased Estimator to Fuse Delayed Measurements in Distributed
Sensor Networks with Application to UAV Fleet. Springer, 2013 (Edited
Volume -Bar-Itzhack Memorial Symposium on Estimation, Navigation, and
Spacecraft Control - Daniel Choukroun (Ed.)).
Chagas,
R.A.J.; Waldmann, J. A Novel Linear, Unbiased Estimator to Fuse Delayed
Measurements in Distributed Sensor Networks with Application to UAV
Fleet. Itzhack Y. Bar-Itzhack Memorial Symposium on Estimation,
Navigation, and Spacecraft Control, 2012, Haifa, Israel.
Chagas,
R.A.J.; Waldmann, J. Observability Analysis for the INS Error Model
with GPS/Uncalibrated Magnetometer Aiding. Itzhack Y. Bar-Itzhack
Memorial Symposium on Estimation, Navigation, and Spacecraft Control,
2012, Haifa, Israel.
Chagas, R.A.J.; Waldmann, J. Geometric Inference-Based Observability
Analysis Digest of INS Error Model with GPS/Magnetometer/Camera Aiding.
19th Saint Petersburg International Conference on Integrated Navigation
Systems, 2012, São Petersburgo, Rússia.
Lustosa, L.R.; Waldmann, J. A novel
imaging measurement model for vision and inertial navigation fusion
with extended Kalman filtering. Itzhack Y. Bar-Itzhack Memorial
Symposium on Estimation, Navigation, and Spacecraft Control, 2012,
Haifa, Israel.
Cordeiro,
T.F.K.; Waldmann, J.. Covariance analysis of accelerometer-aided
attitude estimation for maneuvering rigid bodies. VII Congresso
Nacional de Engenharia Mecânica CONEM 2012, Sao Luis - MA.
Godoi,R.G.;
Waldmann, J. Sistema de Controle de Atitude Para Satélite Estabilizado
em 3 Eixos com Rodas de Reação. VII Simpósio Brasileiro de Engenharia
Inercial, 2012, São José dos Campos, SP.
dos Santos, S. R.
G. ; Waldmann, J. Desenvolvimento de um Ambiente de Teste para
Implementação em Tempo Real de Sistema de Controle de Atitude. VII
Simpósio Brasileiro de Engenharia Inercial, 2012.
back
Staff and collaborators (setembro 2014):
- Jacques Waldmann:
Professor - Head - ITA
- Raul Ikeda
Gomes da Silva:
Professor - INSPER
- Rafael Marcus Contel Coutinho
Technician
- Leonardo Teles da Silva
Technician
- Marcus Vinicius da Costa Ramalho
Aeronautical Engineer - Collaborator - Itamaraty
- Maurício
Andrés Varelas Morales
Professor - Collaborator - ITA
- Sérgio Frascino Müller de Almeida
Professor - Collaborator - ITA
- Thiago Felippe Kurudez Cordeiro
Professor - Collaborator - UnB
- Ronan Arraes Jardim Chagas
D.C. Researcher - Collaborator - INPE
- Tiago Bücker
M.C. Electronic Engineer - Collaborator
back
Photos/Videos:
 First configuration used for monocular vision tracking with pinhole
microcamera Pacific VP-500 and lens with focal length 3.7mm. (Dec/96).
First configuration used for monocular vision tracking with pinhole
microcamera Pacific VP-500 and lens with focal length 3.7mm. (Dec/96).
Algorithm
1: Motion detection, gray level segmentation and motion centroid
estimation. Requires a background with a quite homogeneous texture. (AUTOTR-N.MPG
- 525 KB)
Algorithm
2: Compensates the background motion induced by camera tracking motion
by means of measurements from encoders attached to the head axes,
morphological filtering (erosion followed by dilation), motion
segmentation, and motion centroid estimation. Requires knowledge of the
focal length of the lenses.( EDVATR-N.MPG
- 1.7MB)
Configuration
used for vergence, pan, and tilt control of the stereoscopic vision
head, switching between the video signal sources, and development
of a graphical user interface.( Jul/96 - Mar/97)
Video presenting the graphic user interface, and the pose and angular velocity control modes. (CNPQ-S.MPG
- 39.7MB)
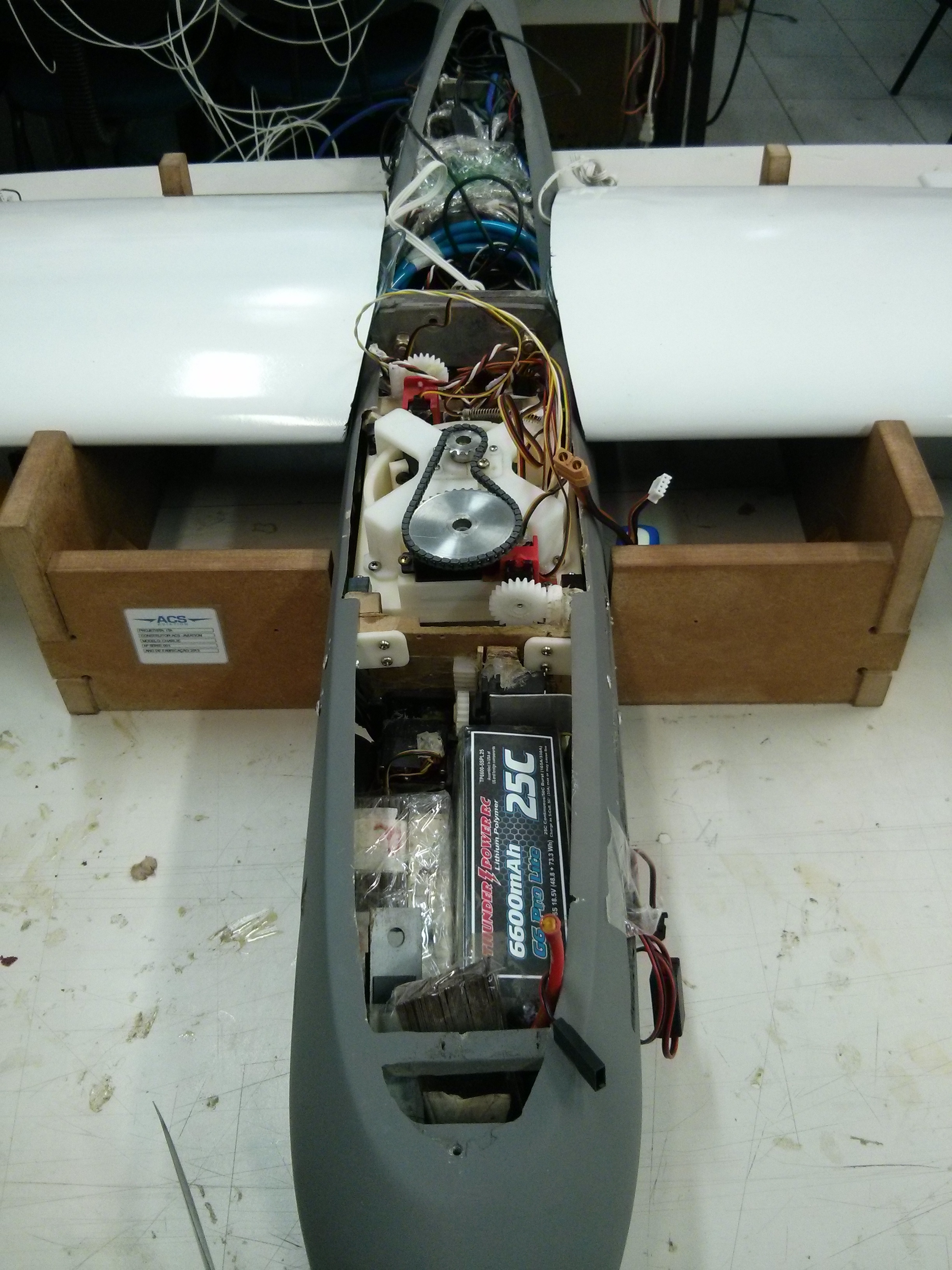
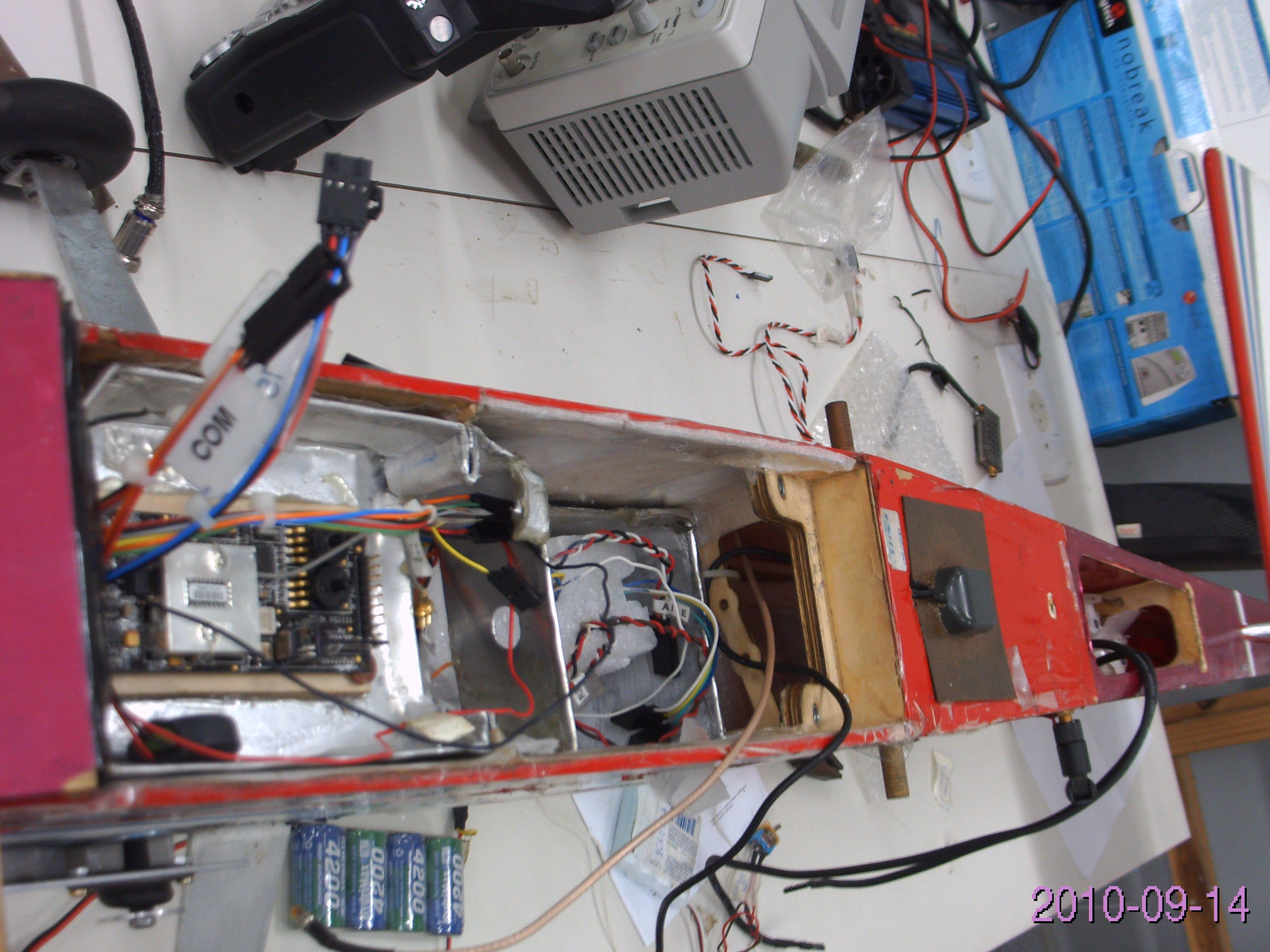
Test platforms: UAVs and bicycle instrumented for INS/GPS/magnetometer/camera integration



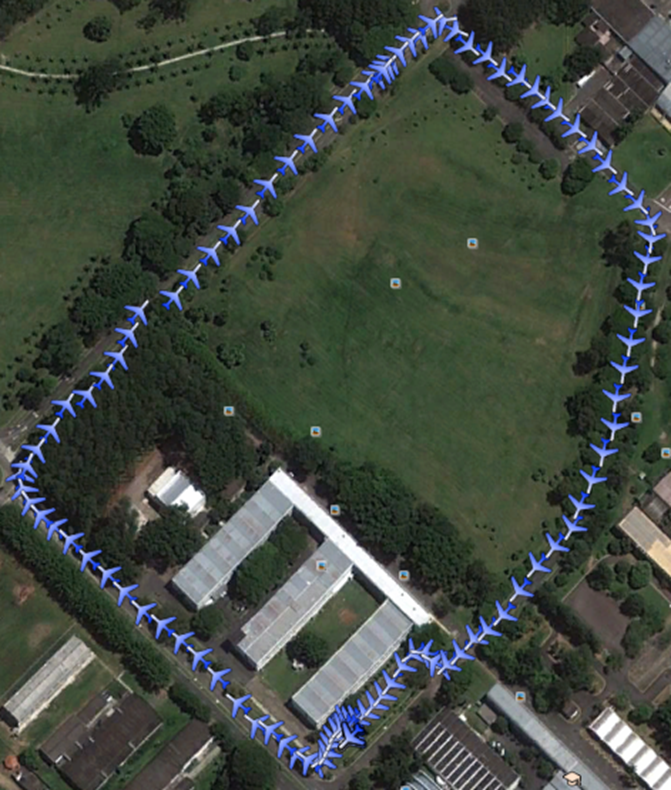
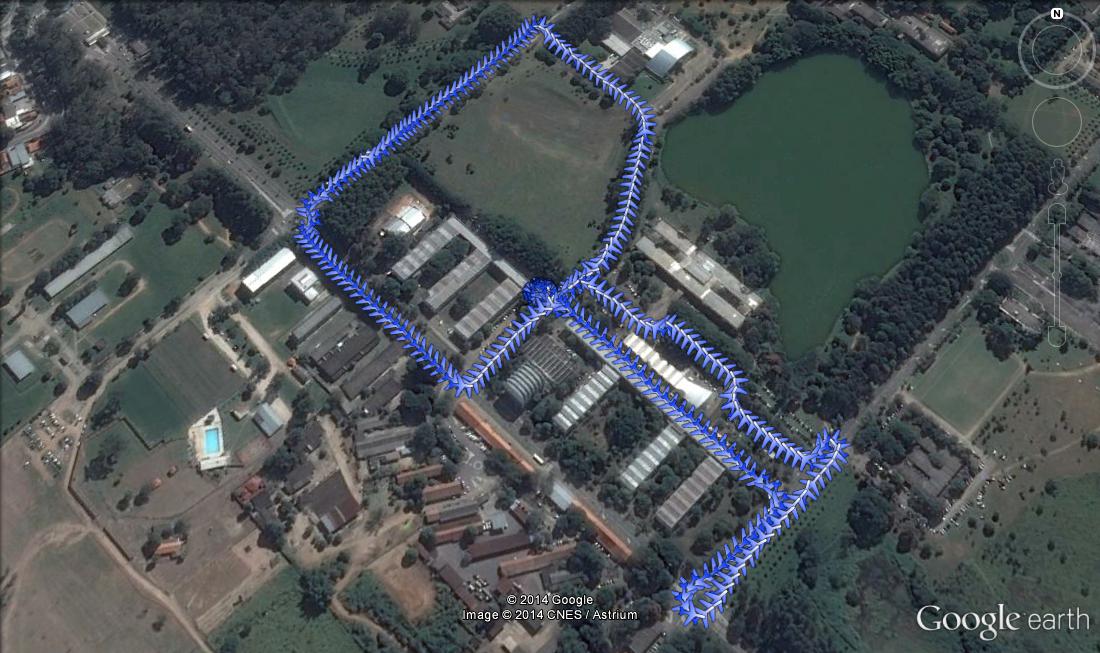
Results of
inertial navigation aided by INS/GPS/magnetometer integration - various
experiments with the sensor suite undergoing motion through ITA campus
either on foot or by bicycle on a helmet:
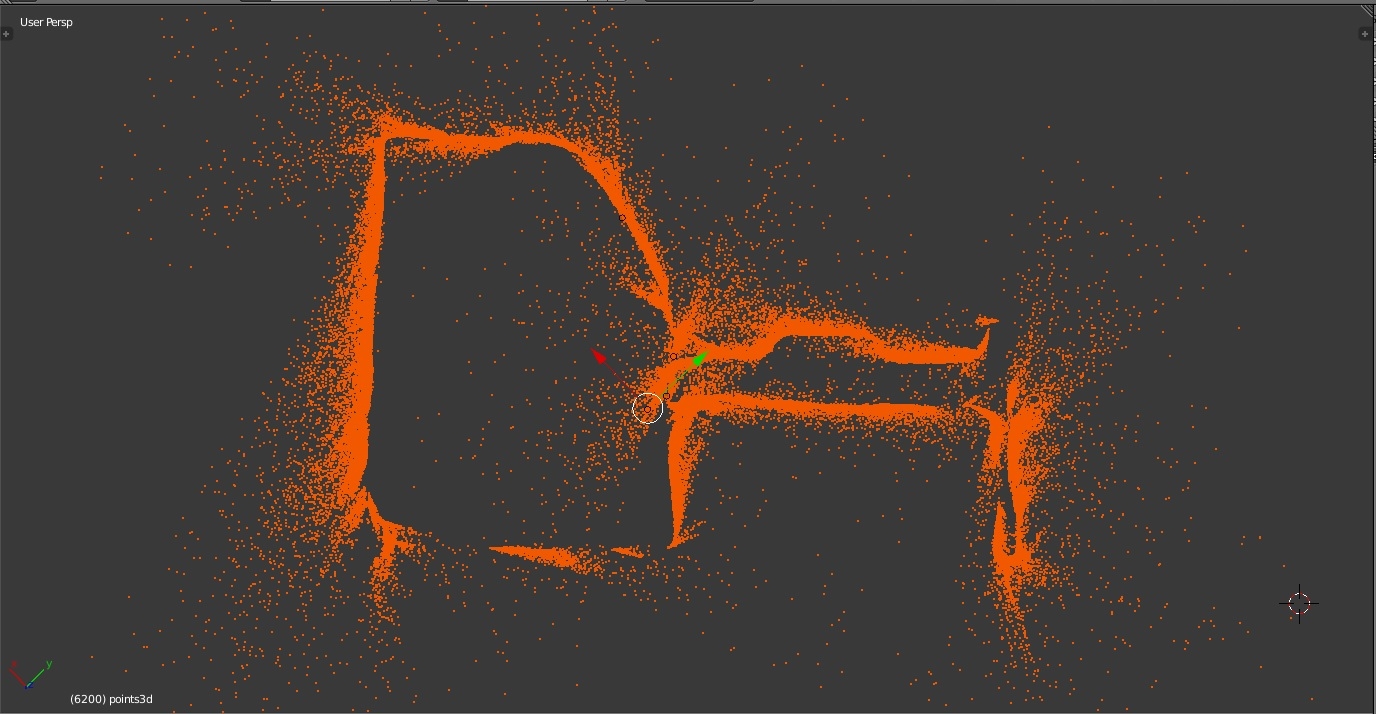
Top view of a
3D reconstruction of the structure as viewed from the camera on the
helmet during inertial navigation aided by INS/GPS/magnetometer
integration. The optical flow is assumed as arising solely from the
camera egomotion (the scenario is assumed static).
Images with
moving cars, cyclists, or pedestrians with respect to the otherwise
static scenario were manually discarded when computing the structure
from motion (SFM) solution.
Video rendering of the optical flow-based SFM
solution as viewed from the cyclist helmet camera during
GPS/magnetometer aided inertial navigation in a 5-minute
experiment.
Octree-based visualization with 1m-edge cube
voxels, and departing from the reference frame origin marked with the
white circle in the above image.
Altitude differences displayed with varying colors.
Cyclist path starts toward the mess hall,
completes the lap traversing the area between ITA and the mess hall,
then turns right to ride down the street where the Dean's office is
located, turns right and follows straight until the U-turn, turns 180
degrees, follows straight, turns left and rides up the ramp toward the
parking lot between the ELE/COMP building and the library, and finally
returns to the starting point.
The distinct voxel colors at the
region of the starting point are due to the changing GPS satellite
geometry as the satellites follow their orbital paths in the sky during
the experiment, thus producing altitude estimates at the same location
differing by about 10m and affecting the 3D reconstruction.
ExperimentoINS-GPS-FluxoOptico_reconstr3DAbril2015.mp4
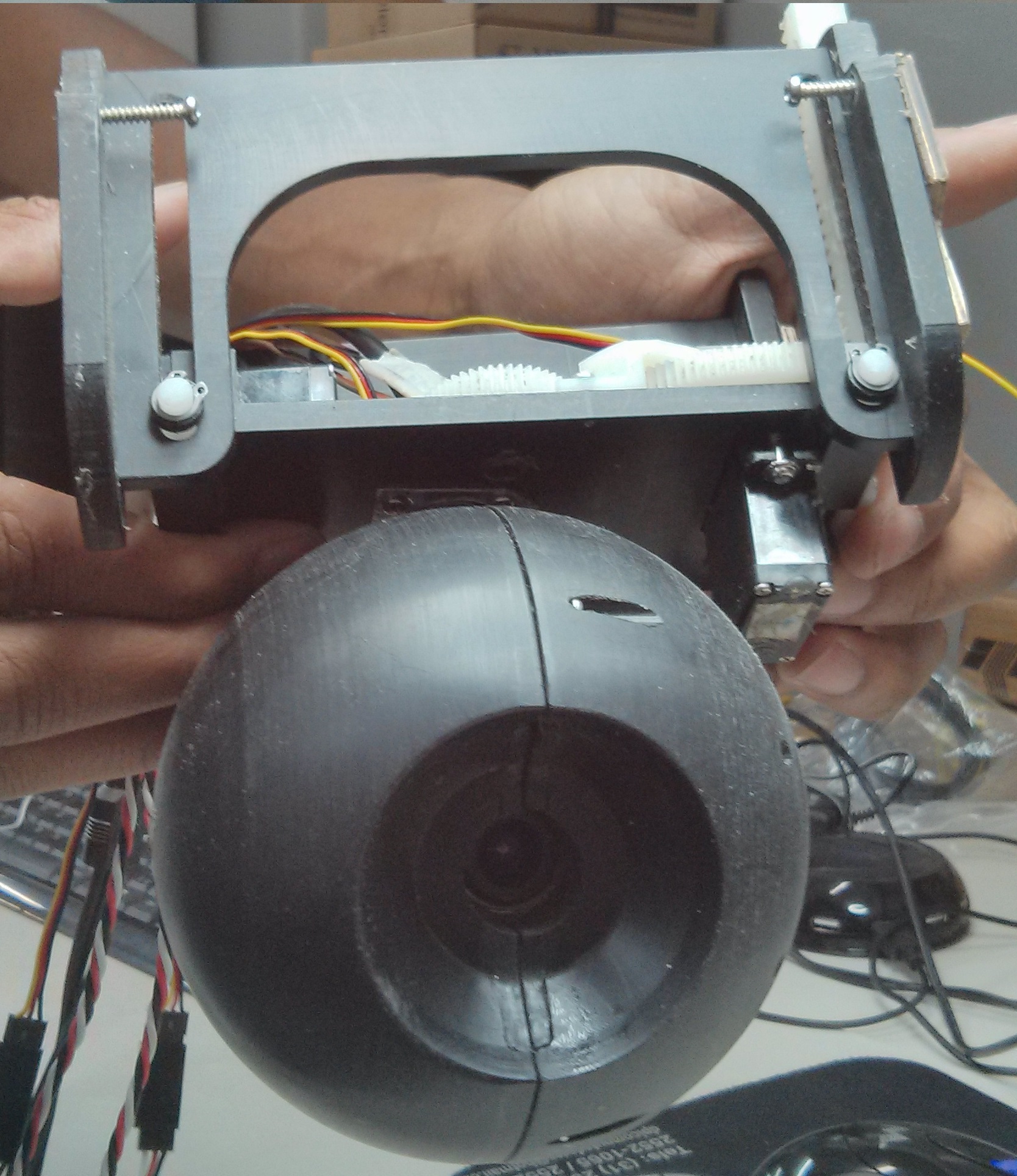
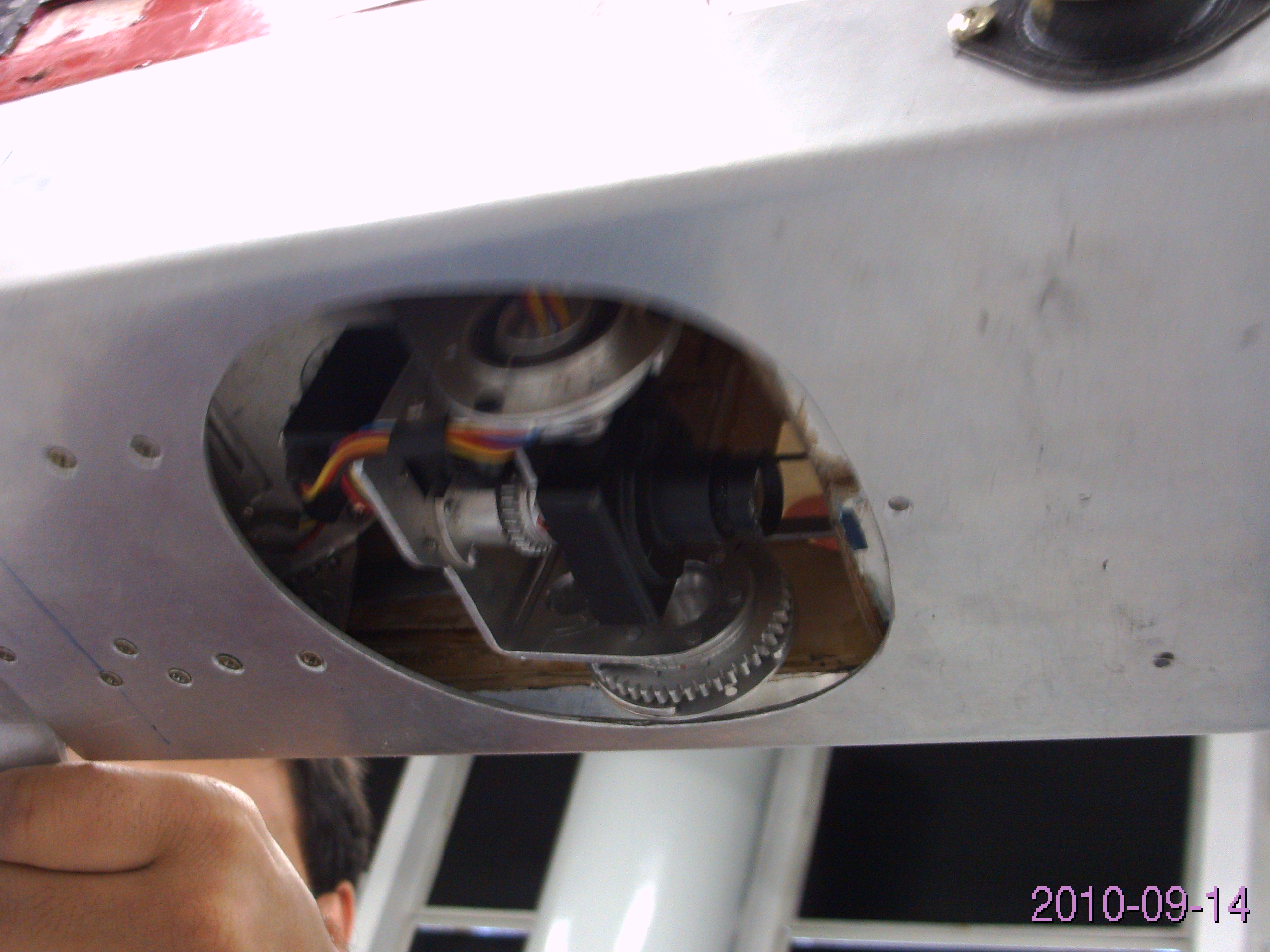
Vídeo
captured by the 3-gimballed imaging pod Mk03 conceived, designed, 3D
printed, integrated with the sailplane, and tested in the lab -
equipped with an analog Sony Block IXA camera and operating in
gyrostabilized mode:
imageador 02.wmv


3D design of sailplane with retractable imaging pod.
MITSA-based target tracking and visual servoing by the pan/tilt step motors in a more recent imaging pod setup:
Rastreio20150602.avi
fc2_save_2015-06-16-170727-0000.mp4
Optical flow-based image stabilization. Video acquired while cycling at ITA campus with digital PointGrey Firefly monochrome camera on the helmet. Bicycle instrumented for video acquisition and with a video link to a remote station.
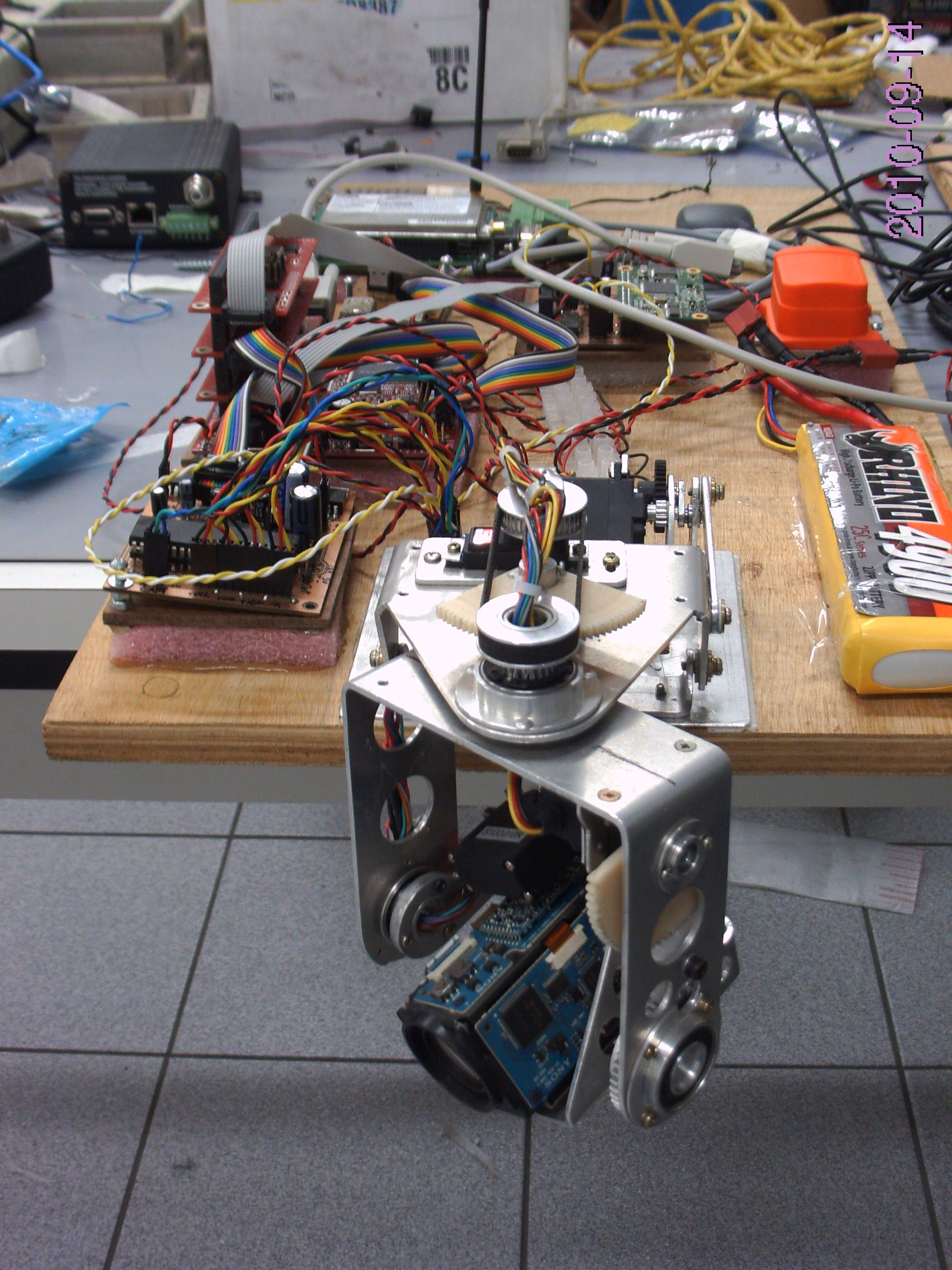
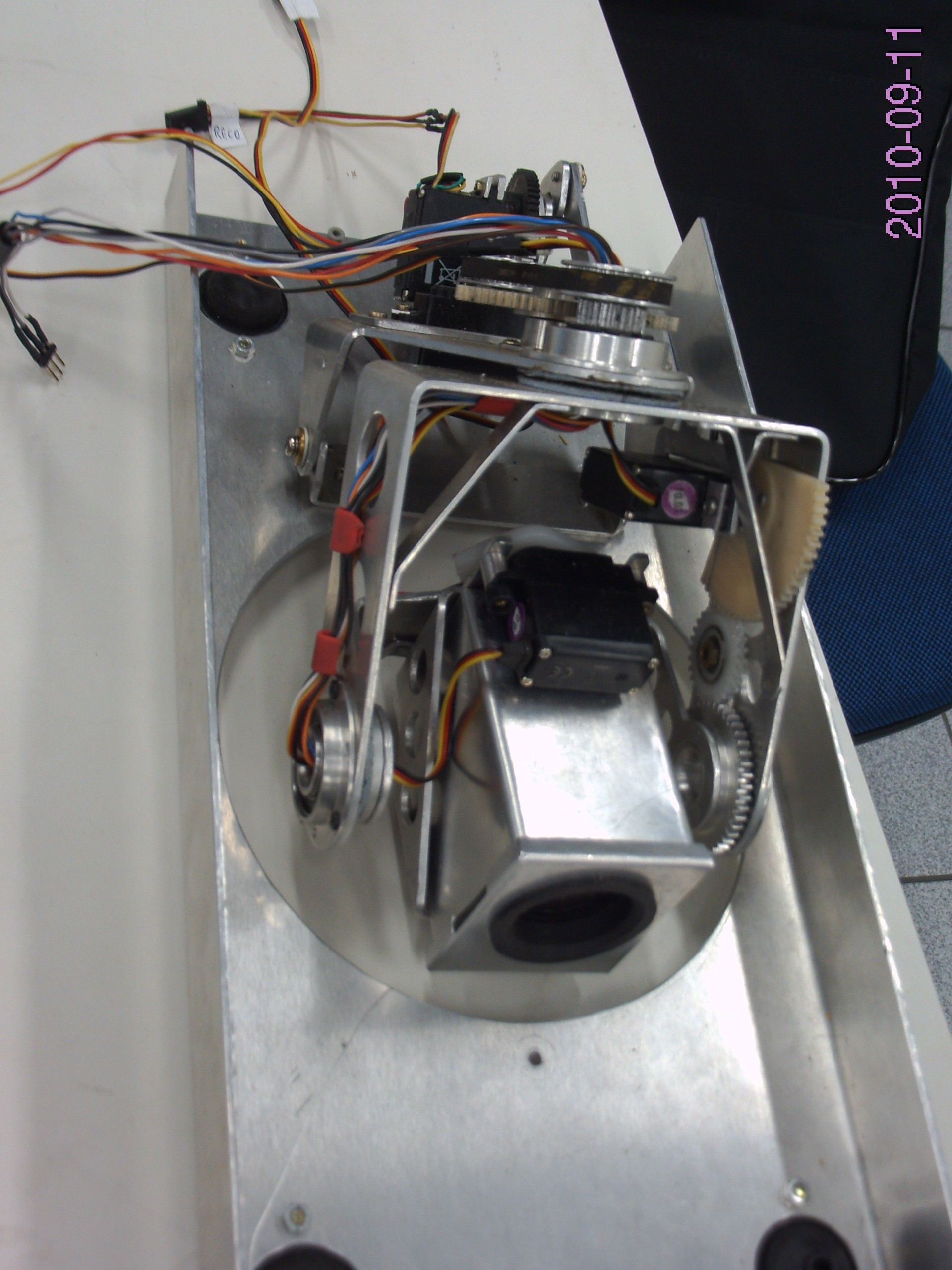
Biological drive
Video of an earlier 3-gimballed gyrostabilized imaging pod prototype - October 2010
First imaging pod prototypes - CNC-manufactured in polyacetal:

Former prototype with mechanical damping to mitigate vibrations from the internal combustion engine:


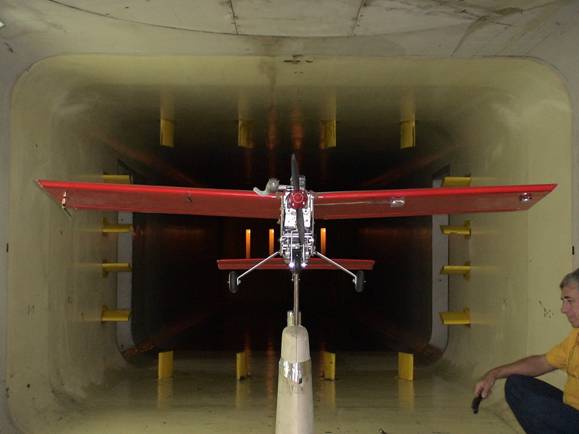
Wind tunnel tests at Instituto de Aeronáutica e Espaço (IAE)



Site in construction - coming next: test flights videos and images
back
[Scope and objectives] [Active vision head]
[History] [Course work]
[Equipment] [Publications] [Staff and collaborators][Photos/Videos]
|
Última atualização:
|
Página construída por:
|
|
28/setembro/2014
|
JW
|